Human-centered Physical Intelligence (HPI) Lab
The HPI Lab is part of the Department of Artificial Intelligence at Hanyang University ERICA.
Our mission is to develop human-centered physical AI agents that can perceive, act, and interact in the real world, enabling intelligent systems to provide safe and beneficial services to humans and society.
To achieve this, our research advances 3D environment perception, robotic action learning, and human–AI–robot interaction, with the goal of building physical AI agents that are adaptive, robust, and socially acceptable in real-world environments such as autonomous driving, manufacturing, logistics, healthcare, and households.
Our research topics are (not limited to):
- 3D Visual Perception and Understanding (e.g., MapUnveiler, ProtoOcc)
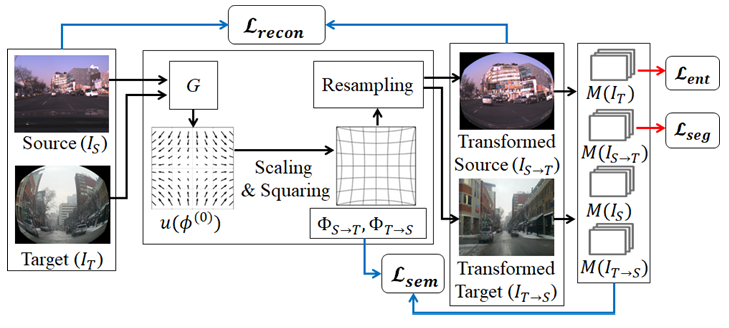
- Cross-modal Representation Learning & Knowledge Transfer (e.g., DaDA, STXD, UDGA)
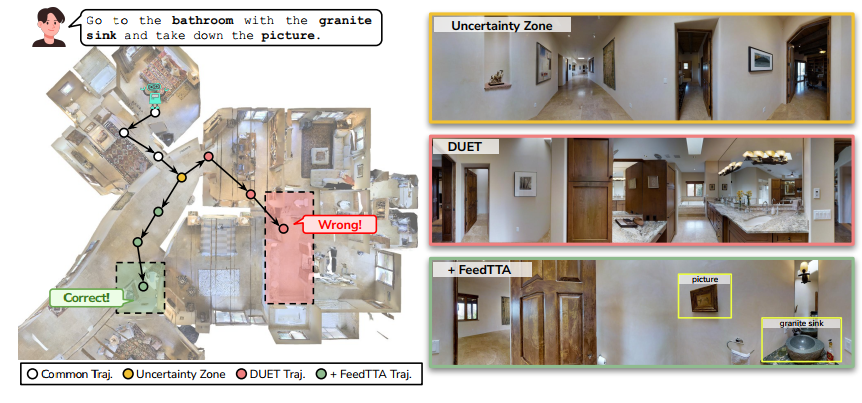
- Multi-modal Robotic Action Learning (e.g., DAM-VLA, FeedTTA, ATENA)
- Human-AI-Robot Interaction (e.g., PuppetX, MotionFlow, TCM)
Open Positions
We are looking for motivated undergraduate interns and graduate students (M.S., Ph.D., Integrated) to pioneer the next generation of Physical AI. Apply now!
News
| May 2026 | Welcome Minchan Kim, Gisu Park, Duyeon Won, Su Lee, and Sangho Jung to the HPI Lab as undergraduate interns. |
|---|---|
| Apr 2026 | Prof. Jang gave a talk on Human-centered Physical AI at Kakao Mobility. |
| Mar 2026 | Human-centered Physical Intelligence (HPI) Lab is officially opened at the Department of Artificial Intelligence, Hanyang University ERICA 🥳 |
| Sep 2025 | A paper about “Active Test-time Vision-Language Navigation” is accepted to NeurIPS 2025. |
| May 2025 | A paper about “Test-Time Adaptation for Online Vision-Language Navigation” is accepted to ICML 2025. |
| Feb 2025 | A paper about “Efficient 3D Occupancy Prediction” is accepted to CVPR 2025. |
| Sep 2024 | Two papers about “Unified Domain Generalization & Adaptation” and “Online HD-Map Construction” are accepted to NeurIPS 2024. |
| Dec 2023 | A paper about “Cross-Modal and Domain Adversarial Adaptation” is accepted to AAAI 2024. |
| Sep 2023 | A paper about “Structural and Temporal Cross-Modal Distillation” is accepted to NeurIPS 2023. |
| Oct 2022 | A paper about “Distortion-aware Domain Adaptation” has been designated as an “Oral” at NeurIPS 2022 🥳 |
| Sep 2022 | A paper about “Modeling Cumulative Arm Fatigue in Mid-Air Interaction” is accepted to International Journal of Human-Computer Studies (IJHCS). |
| Sep 2022 | A paper about “Distortion-aware Domain Adaptation” is accepted to NeurIPS 2022. |